サッカーのキックでは、生体力学的に何が起きているのでしょうか。本記事では、スローモーションのスマホ映像とマーカーレス姿勢推定だけを使って、キックを局面(フェーズ)ごとに分解し、関節角度と角速度の曲線からその仕組みを読み解きます。
方法
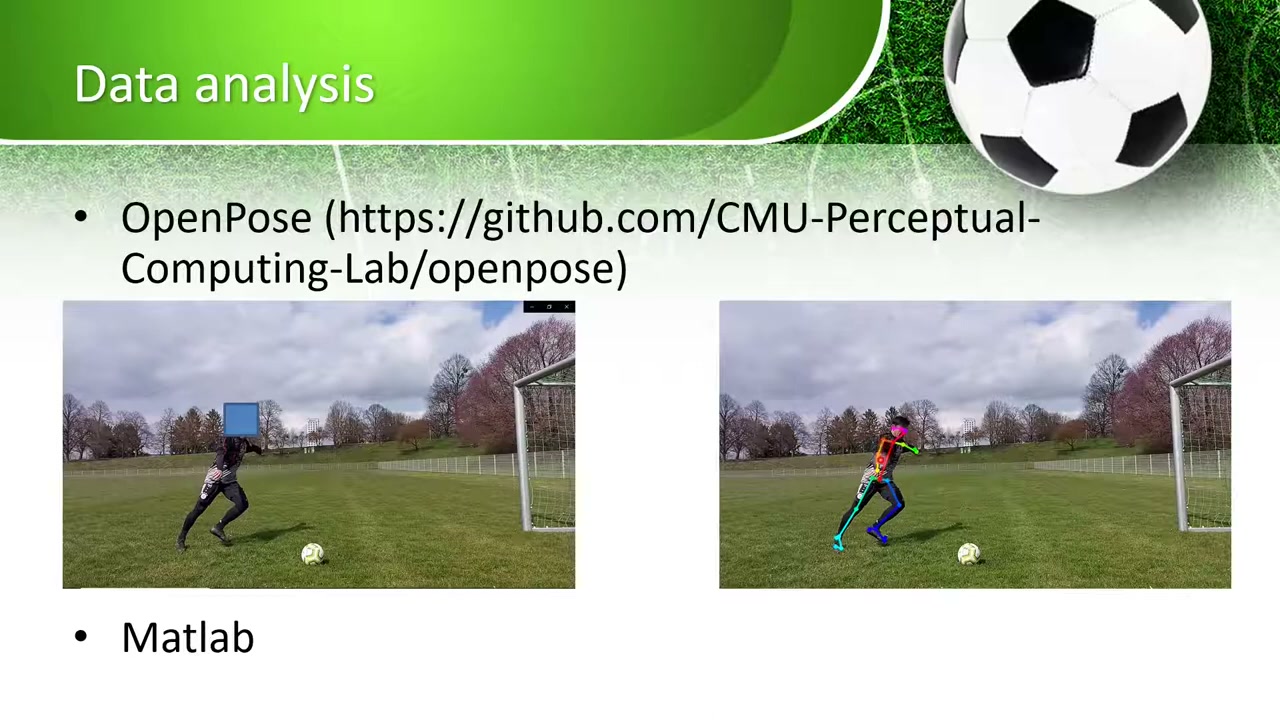
機材はあえてシンプルです。友人がボールを蹴る様子を、スマートフォン(Galaxy S10 Lite)で 240 fps のスローモーション撮影。この映像を OpenPose(CMU のオープンソース姿勢推定器)に入力すると、フレームごとに2Dの関節位置——股関節・膝・足首・肩・肘など——が JSON で出力されます。その JSON を MATLAB に読み込み、関節角度と角速度を計算して時間に対してプロットします。
キックのフェーズ
キックは、蹴り脚(kicking leg)と支持脚(supporting leg)という2つの連係した動きとして捉えると分かりやすいです。

蹴り脚:
- トーオフ(toe-off) — 蹴り脚が地面を離れる。
- バックスイング(BS) — トーオフから最大股関節伸展まで。脚を後方に振る。
- 最大股関節伸展 — 大腿が体幹の軸に対して最も後方に来る点。
- レッグコッキング(LC) — 最大股関節伸展から最大膝屈曲まで。脚は前方へ動き始めるが膝はまだ屈曲。
- レッグアクセラレーション(LA) — 最大膝屈曲からボールインパクトまで。脚が前方へ加速し膝が伸展。
(慣例の注意: 生体力学では膝を屈曲するほど膝角度は増加します。幾何学的な直感とは逆です。)
支持脚:
- 接地(landing) — ボールへ走り込みながら支持脚が接地。
- 衝撃吸収(shock absorption) — 膝と股関節を屈曲して地面反力を吸収し、身体を安定させる。ここで不安定だとキックを外す。
- エネルギー伝達(ET) — 続いて膝と股関節を伸展し、力学的エネルギーを支持脚から蹴り脚へ伝える。
強いキックの決め手
キックの威力を最も左右するのはレッグアクセラレーションのフェーズです。インパクト前に蹴り脚を加速させるほど、ボールを強く叩けます。このスイング速度は、強いキックを評価する指標のひとつとして研究でよく使われます。(精度——ボール接触点——も重要な指標ですが、解析がずっと難しいためここでは扱いません。)
支持脚はこの加速に二面的に影響します。衝撃吸収の間は蹴り脚の加速に逆らう方向に働きますが、後半のエネルギー伝達で大きく後押しします——そしてそれがデータに表れます。
データを読む
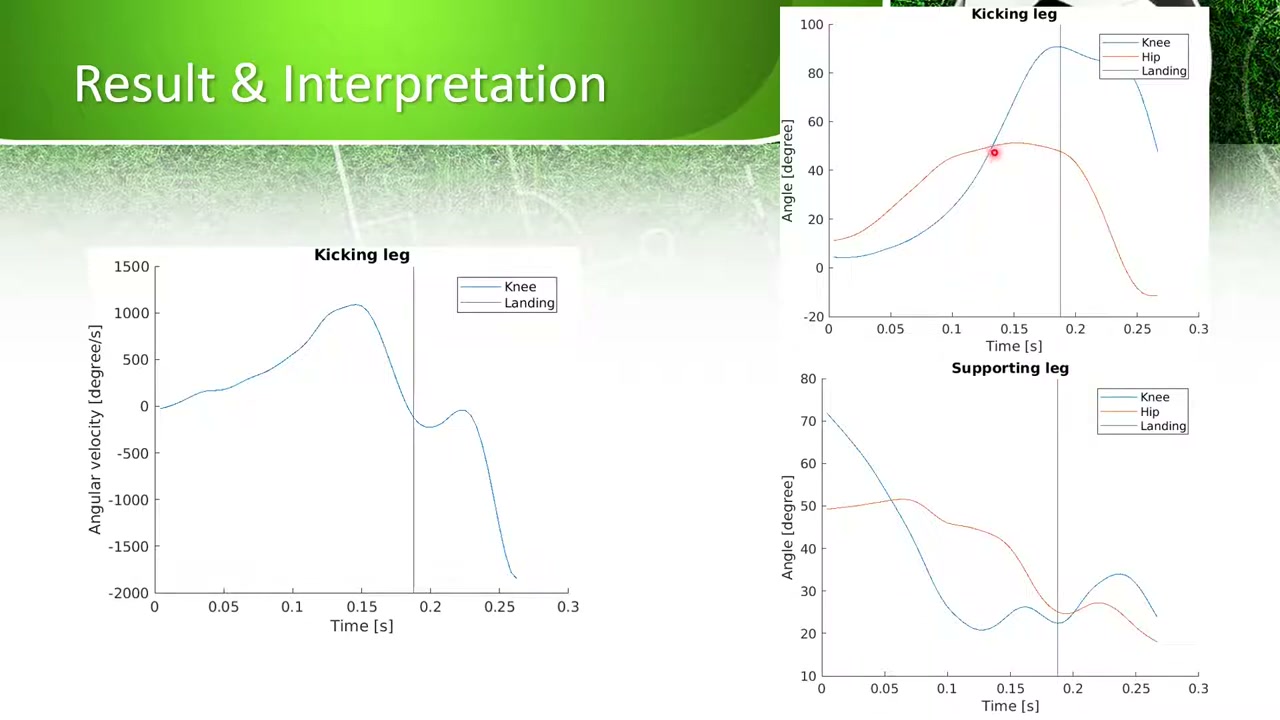
関節角度(右)。 蹴り脚では、まず股関節が最大伸展に達し(脚を後方へ振り切る)、次に膝が最大屈曲に達してから、両者がボールへ向けて前方へ駆動します——股関節伸展が膝屈曲に先行する、まさにフェーズモデル通りです。股関節角度は、正(大腿が体幹の軸より後方)→ゼロ→負(前方)へと、脚が前に出るにつれ変化します。支持脚では、膝と股関節がともに屈曲(衝撃吸収)し、その後ともに伸展(エネルギー伝達)する様子が見えます。
膝角速度(左)。 ここで力学がはっきり見えます。蹴り脚の膝はまず大きな屈曲速度を示し、最大膝屈曲でゼロになります。続いて下腿(シャンク)が小さく前方へ加速し始めますが、いったん減速します——これが支持脚の衝撃吸収による負の影響です。その直後、エネルギー伝達によってボールへ向けて非常に鋭く加速します——その傾きは衝撃吸収前の加速よりもさらに急です。この最後の一伸びこそ、タイミングの良い力強いキックの証です。
まとめ
スマホとスローモーション、そして無料ツールだけで、力強いキックの背後にある協調——バックスイング、レッグコッキングから加速への「しなり」、そして支持脚の衝撃吸収とエネルギー伝達の絶妙なタイミング——を定量化できます。これがマーカーレス動作解析の可能性です。ラボが無くても、本物のバイオメカニクスができます。
次回の動画では、OpenPose の使い方(無料)と、その出力を MATLAB(学生ライセンスなら無料)で解析する方法を紹介します。Python でも同様に可能です。見逃さないよう、YouTube のチャンネル登録をぜひ。
著者について
Takashi Fukushima — スポーツ・運動科学 × Human Pose Estimation × Computer Vision × XR を横断して研究・開発しています。
- YouTube(登録): Takashi Fukushima|Sports Science & Pose Estimation
- 研究(ORCID): orcid.org/0000-0002-7318-3384
- ウェブサイト: takashifukushima.com
- お問い合わせ: お問い合わせフォーム