What actually happens, biomechanically, when you kick a football? In this post we break a kick down phase by phase using nothing more than a slow-motion phone video and markerless pose estimation — then read the story straight off the joint-angle and angular-velocity curves.
The method
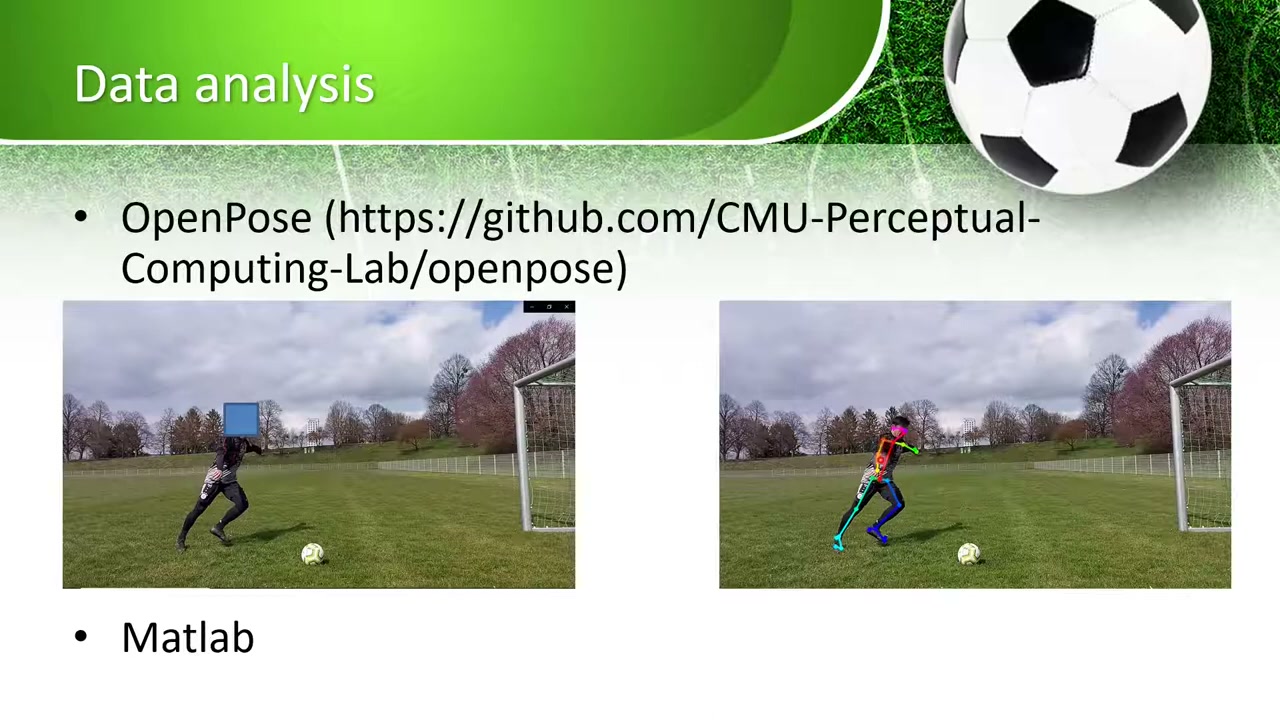
The setup is deliberately low-tech: a friend kicking a ball, filmed in slow motion on a smartphone (a Galaxy S10 Lite at 240 fps). The video goes into OpenPose (the open-source pose estimator from CMU), which processes it frame by frame and outputs 2D joint positions — hip, knee, ankle, shoulder, elbow, and so on — as JSON. Import that JSON into MATLAB, compute joint angles and angular velocities, and plot them over time.
The phases of a kick
A kick is best understood as two coordinated stories: the kicking leg and the supporting leg.

Kicking leg:
- Toe-off — the kicking foot leaves the ground.
- Back swing (BS) — from toe-off to maximum hip extension; the leg swings backward.
- Maximum hip extension — the thigh is at its most backward relative to the body line.
- Leg cocking (LC) — from max hip extension to maximum knee flexion; the leg begins moving forward while the knee keeps flexing.
- Leg acceleration (LA) — from maximum knee flexion to ball impact; the leg accelerates forward and the knee extends.
(A quick convention note: in biomechanics the knee angle increases as the knee flexes — the opposite of the geometric intuition.)
Supporting leg:
- Grounding / landing — the support foot plants as you run into the ball.
- Shock absorption — the knee and hip flex to absorb the ground reaction force and stabilize the body. If the body isn’t stable here, you miss the kick.
- Energy transfer (ET) — the knee and hip then extend, transferring mechanical energy from the supporting leg into the swing leg.
What makes a powerful kick
The single biggest driver of kick power is the leg acceleration phase: the more the swing leg accelerates before impact, the harder the ball is struck. That swing velocity is one of the performance indicators researchers use to evaluate powerful kicking. (Accuracy — the exact point of ball contact — is another important indicator, but it’s much harder to analyze and is set aside here.)
The supporting leg has a two-sided influence on that acceleration. During shock absorption it actually works against the swing leg, but in the second half, energy transfer gives a strong positive boost — and this is exactly what the data shows.
Reading the data
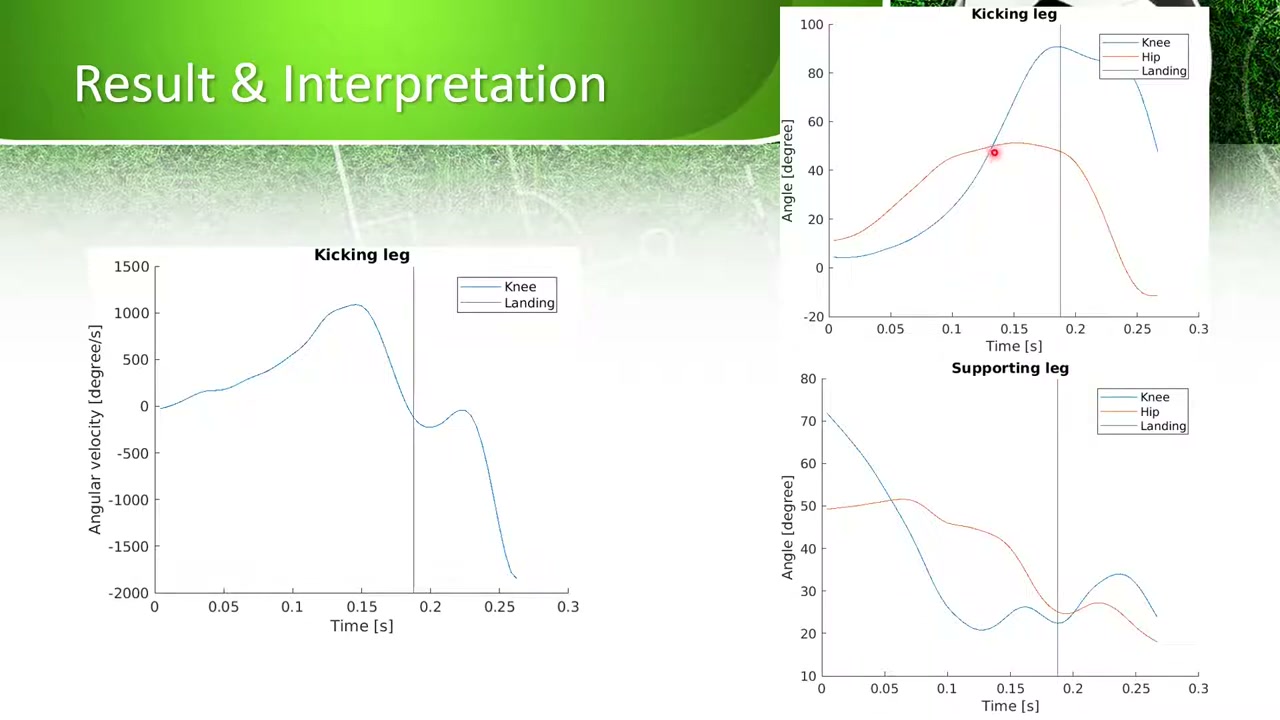
Joint angles (right). For the kicking leg, the hip reaches maximum extension first (the leg swung fully back), then the knee reaches maximum flexion, before both drive forward toward the ball — hip extension precedes knee flexion, exactly as the phase model predicts. The hip angle moves from positive (thigh behind the body line) through zero to negative (thigh in front) as the leg comes forward. For the supporting leg, you can see the knee and hip flex together (shock absorption) and then extend together (energy transfer).
Knee angular velocity (left). This is where the mechanics really show up. The kicking-leg knee first has a large flexion velocity that falls to zero at maximum knee flexion; the shank then starts forward with a small acceleration — but it briefly decelerates, the negative influence of the supporting leg’s shock absorption. Right after, there’s a very sharp acceleration into the ball, driven by energy transfer — and its slope is even steeper than the acceleration before shock absorption. That final burst is the signature of a well-timed, powerful kick.
Takeaway
With just a phone, a slow-motion clip, and free tools, you can quantify the coordination behind a powerful kick — the backswing, the whip of leg cocking into acceleration, and the crucial timing of the supporting leg’s shock absorption and energy transfer. That is the promise of markerless motion analysis: real biomechanics, without a lab.
In an upcoming video I’ll walk through how to run OpenPose (it’s free) and analyze its output in MATLAB (free with a student license) — and the same is possible in Python. Subscribe on YouTube so you don’t miss it.
About the author
Takashi Fukushima — research & development across Sports & Exercise Science, Human Pose Estimation, Computer Vision, and XR.
- YouTube (subscribe): Takashi Fukushima|Sports Science & Pose Estimation
- Research (ORCID): orcid.org/0000-0002-7318-3384
- Website: takashifukushima.com
- Contact: Get in touch